
The first laparoscopic gastric bypass procedures, which surgically reduce stomach size, transformed the clinical approach to obesity treatment. But like all major surgeries, they carry risks—from anesthesia to extended recovery time. Researchers at the Johns Hopkins School of Medicine are exploring less invasive alternatives that could achieve similar effects without surgery.
A mechanical engineering senior design team is contributing to that effort by developing a device to improve how experimental therapies are delivered to the stomach. Sponsored by School of Medicine Assistant Professor Venkata Akshintala, the team designed a system that can pass through a standard 2.8 mm endoscope and inject a sustained-release bleomycin microparticle formulation into the stomach wall. The therapy—still under development—aims to remodel stomach tissue and potentially reduce stomach volume without surgical removal.
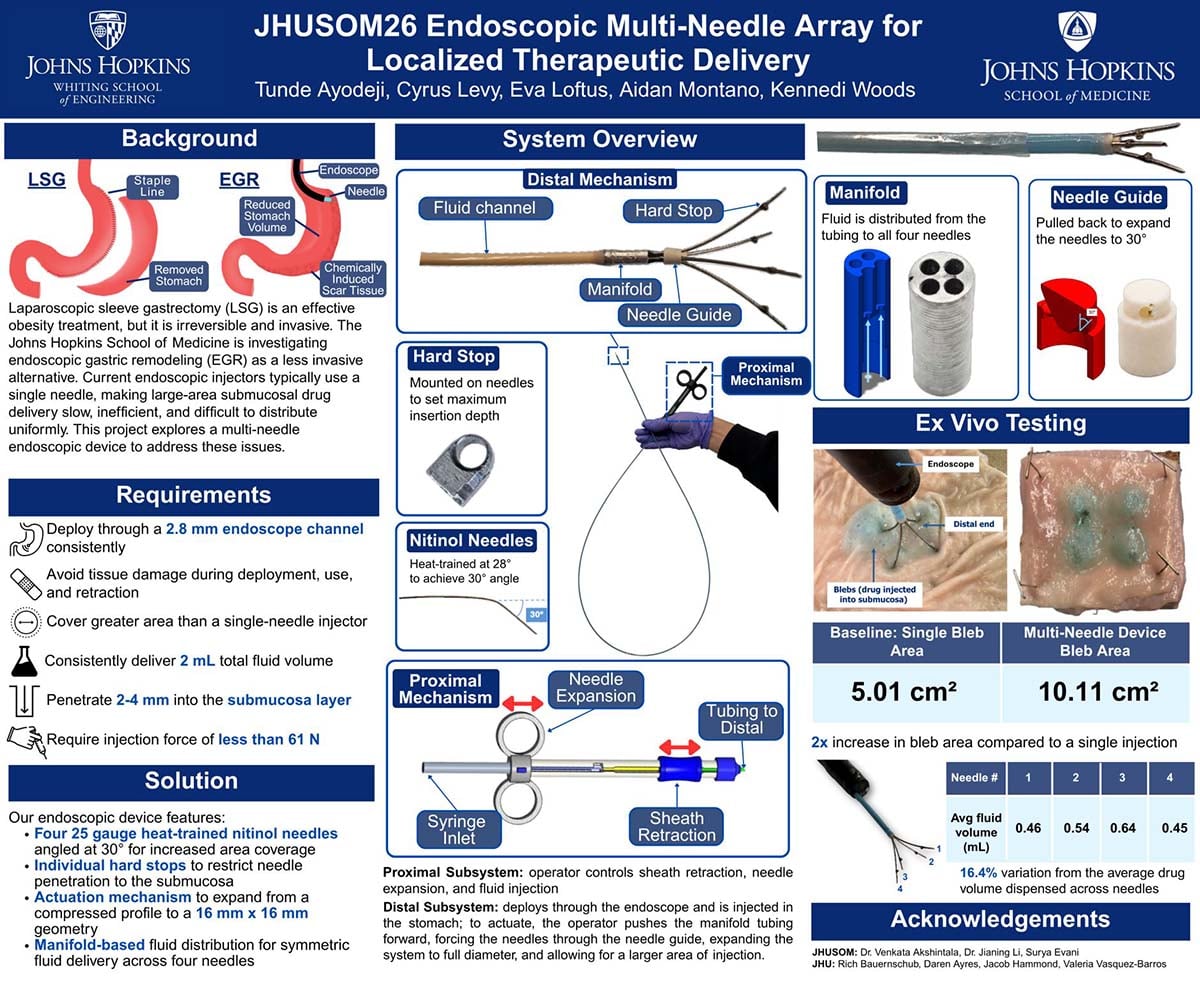
Inserting the endoscope was relatively straightforward; the challenge was delivering the drug efficiently once inside. Current endoscopic injectors typically use a single needle, requiring multiple injections to treat a large area. The team’s solution uses four 25-gauge needles—similar in size to those used in hypodermic injections—arranged in a compact, expandable array.
“The whole environment is a lot smaller than all of us expected,” said team member Tunde Ayodeji. “We had to get used to working at this scale as none of us have ever done that before.”

Building on an existing single-needle approach, the team developed a system that distributes fluid through a central channel into a manifold, which splits the flow evenly across all four needles. The needles pass through a guide with angled pathways that allow them to fan outward during deployment, increasing the area that can be treated in a single insertion.
To achieve even coverage, the students designed pre-bent needles that expand once inside the stomach, with each needle following a controlled curved path. Ensuring that motion was precise and repeatable at a very small scale was a key challenge.
“The handheld system at the top had to reliably trigger the components inside the patient to ensure the needles reached their destination every time,” said team member Kennedi Woods. “The small components required a lot of attention to detail as far as tolerance and adjusting.”
The team validated the design through ex vivo testing using porcine stomach tissue to simulate real conditions.
“We used pig stomachs to simulate the human stomach,” Ayodeji said. “That whole internal environment is smaller than we’re used to working in, so we had to wrap our heads around that. I think we did a good job figuring it out.”
The team—Tunde Ayodeji, Cyrus Levy, Eva Loftus, Aidan Chan Montano, and Kennedi Woods—will present their work at the Johns Hopkins Engineering Design Day.