

Create
Design Project Gallery
Simulation-Based Uncertainty Propagation in Geometric Networks for Surgical Robotics
- Program: Computer Science
- Course: Other
- Year: 2026
Project Description:
This project presents a simulation-based framework for uncertainty propagation in geometric networks, addressing a fundamental gap in surgical robotics where no unified method exists to model and query uncertainty across complex systems.
The work integrates geometry, probability, and simulation to enable principled analysis of uncertainty through arbitrary kinematic and sensing networks. The proposed framework supports open chains, branching structures, multi-path Bayesian fusion, and closed-loop constraints, allowing uncertainty to be queried between any two nodes. Analytic covariance propagation is validated against Monte Carlo simulation with less than 2% relative error, demonstrating high accuracy. Results show that multi-path fusion and loop conditioning significantly reduce uncertainty by leveraging network redundancy. The system is modular and extensible, supporting mixed observation types and real-world surgical scenarios.
This work lays the foundation for uncertainty-aware planning, control, and sensing in surgical robotics and provides a scalable bridge between simulation and real-world deployment.
Project Photo:
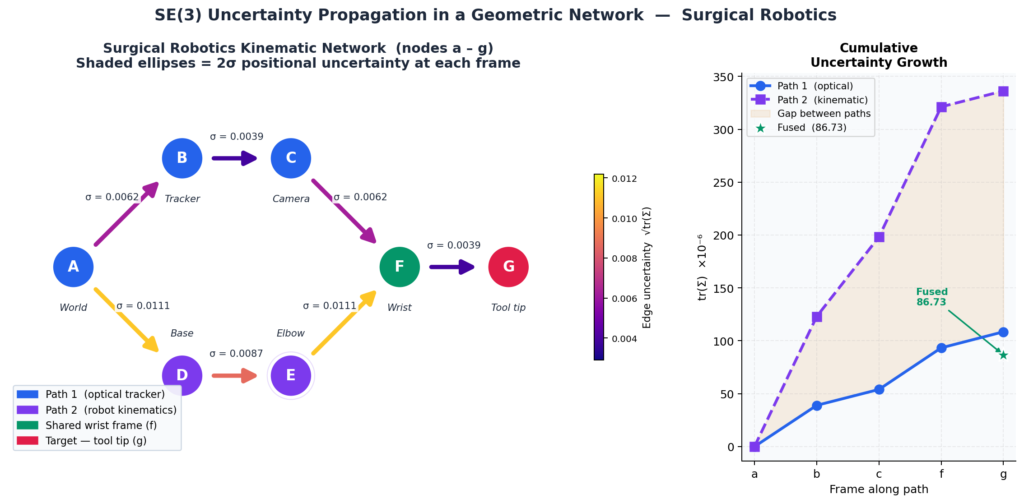
SE(3) uncertainty propagation through a 7-node surgical robotics kinematic network (nodes A–G). Shaded ellipses represent 2σ positional uncertainty at each frame. The right plot shows cumulative uncertainty growth along the optical (Path 1) and kinematic (Path 2) paths, and the fused result (trace = 86.73) after multi-path Bayesian fusion.
