
Although functionally blind, orb-weaving spiders catch prey on their webs by sensing vibrations with their legs while crouching.
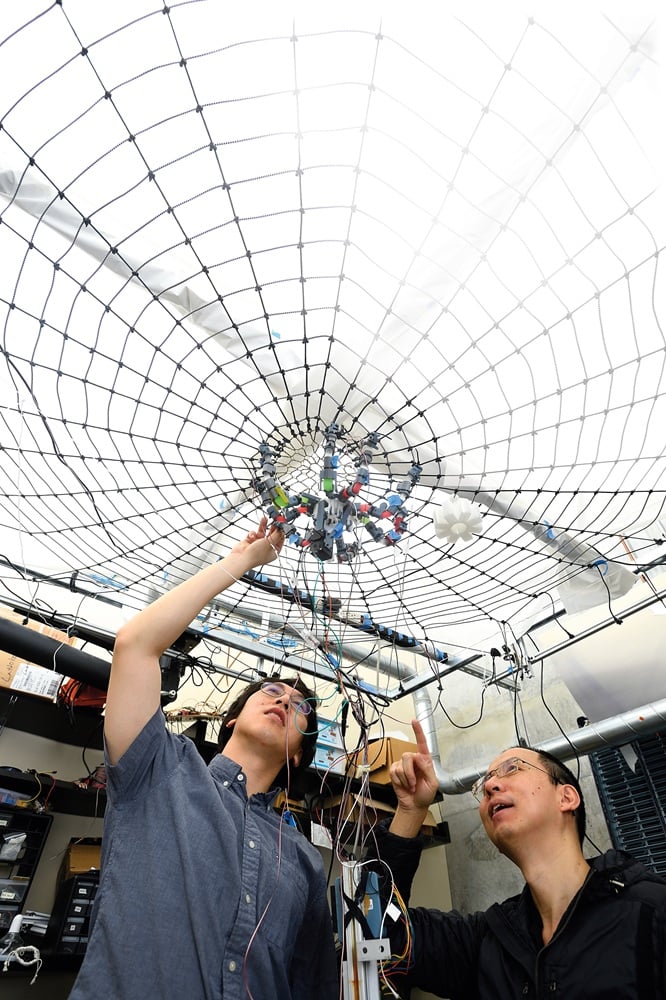
To understand this behavior, Chen Li’s mechanical engineering lab, along with biology Assistant Professor Andrew Gordus and civil and systems engineering Assistant Professor Jochen Mueller, created a spider robot with vibration sensors. It hangs at the center of a wheel-shaped web, and, while crouching, shakes its web to detect a prey robot caught on a spiral thread. It locates the prey by sensing a change in vibration frequency. The closer the prey robot, the shorter its spiral thread, and the higher its frequency—just like a shorter guitar string that vibrates at a higher pitch.
These findings could inform next-generation robotic sensors.