Create
Design Project Gallery
UroSim: Platform for Real-Time Guidance in Surgical Simulations
- Program: Biomedical Engineering
- Course: EN.580.497 Advanced Design Team
- Year: 2026
Project Description:
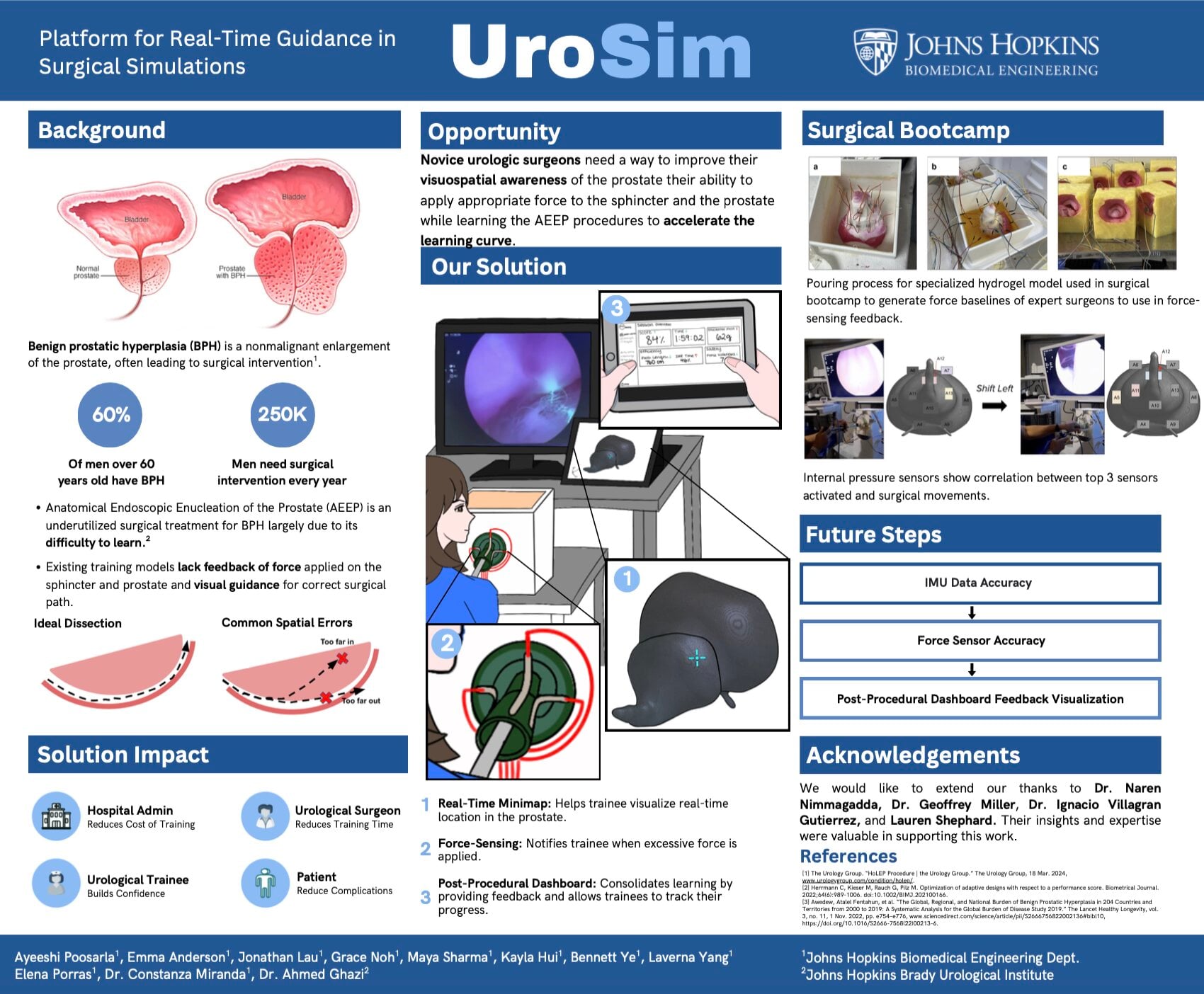
A challenge in Anatomical Endoscopic Enucleation of the Prostate (AEEP) is the application of excessive force from novice urological surgeons during dissection damaging critical structures and lack of realistic surgical training platforms. Moreover, repeated instances of excessive force can also lead to tissue inflammation and scarring, which can compromise the procedural success and prolong recovering. To address these challenges, we developed a novel real-time feedback system integrating conductive force sensors within our simulation phantom to identify regions of the prostate subjected to the greatest force for novice trainees. The integration of force sensors into hydrogel simulation models demonstrated the feasibility of capturing live force data during simulation. Despite set-up limitations, this system has the potential to evolve into a highly valuable training platform for procedure skill acquisition.
Project Photo:
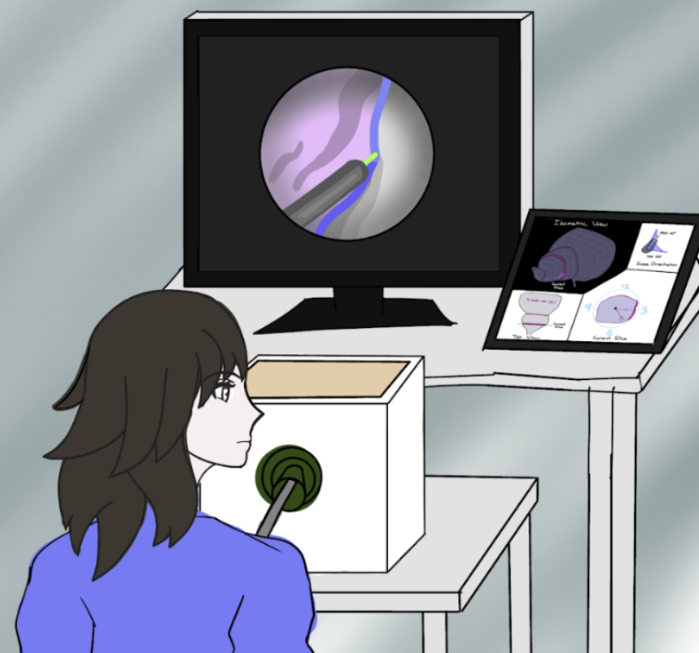
Overall system setup illustrating real-time trainee tracking via the minimap on the tablet. Sensors at the insertion point measure force and jerkiness applied to the external sphincter. After the procedure, the minimap transitions to a post-procedure dashboard displaying performance analytics to support trainee improvement and skill refinement.