

Create
Design Project Gallery
Autonomous and Adaptive Leader-Follower Protocol for Collaborative Robotics
- Program: Electrical and Computer Engineering
- Course: Other
- Year: 2025
Project Description:
In this project, we further developed our robust leader-follower protocol which autonomously coordinates a group, or swarm, of devices. The system is designed to seamlessly adapt to devices dropping out of the swarm unexpectedly and to any new devices joining the network. We focused on two main tasks this year: formal verification of the protocol and developing a demonstration with mobile robots. The formal verification proved that our protocol satisfies both safety and adaptability requirements.
At Design Day, we will have an interactive simulation, which shows how our protocol can coordinate up to 50 robots. We will also present a video of our robot demonstration, which uses five TurboPi robots as devices which autonomously work to each perform a task within different quadrants of a large grid.
Project Photo:
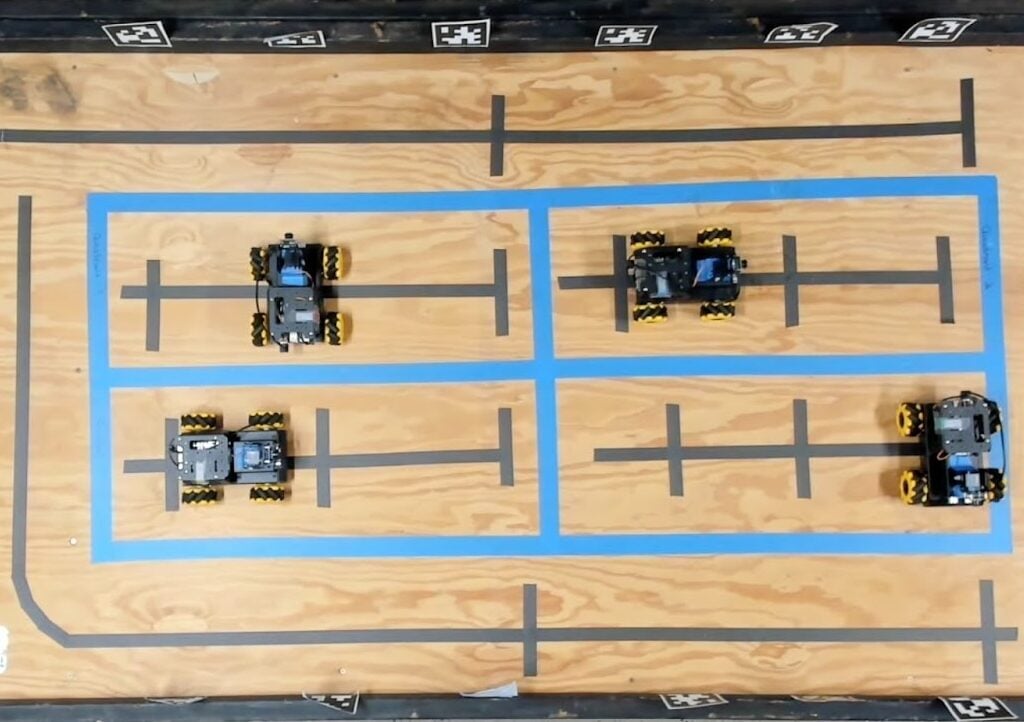
Our five TurboPi mobile robots within the workspace, which has been divided into the four main task quadrants in the middle. The robots are able to autonomously elect a leader, be assigned to a quadrant, and adapt as the robots enter and leave the workspace by following our protocol.