

Create
Design Project Gallery
Autonomous Rescue Drone
- Program: Electrical and Computer Engineering
- Course: EN.520.440/640 Machine Intelligence on Embedded Systems
- Year: 2025
Project Description:
The project develops an autonomous drone utilizing Light Detection and Ranging (LIDAR) and Inertial Measurement Unit (IMU) sensors to navigate a complex maze, while a camera is used to locate a hidden target or prize at the very end. This system simulates real-life scenarios encountered during disaster recovery operations, such as searching burning or collapsed buildings for trapped individuals or pets. LIDAR technology provides precise 3D mapping for obstacle detection, while IMU sensors maintain accurate drone stability and orientation. Additionally, limited camera use preserves battery power in the drone, only being used to detect objects and not for navigation purposes. This advanced sensor integration enhances autonomous navigation capabilities, making the drone suitable for efficient, life-saving search and rescue missions in hazardous environments.
Project Photo:
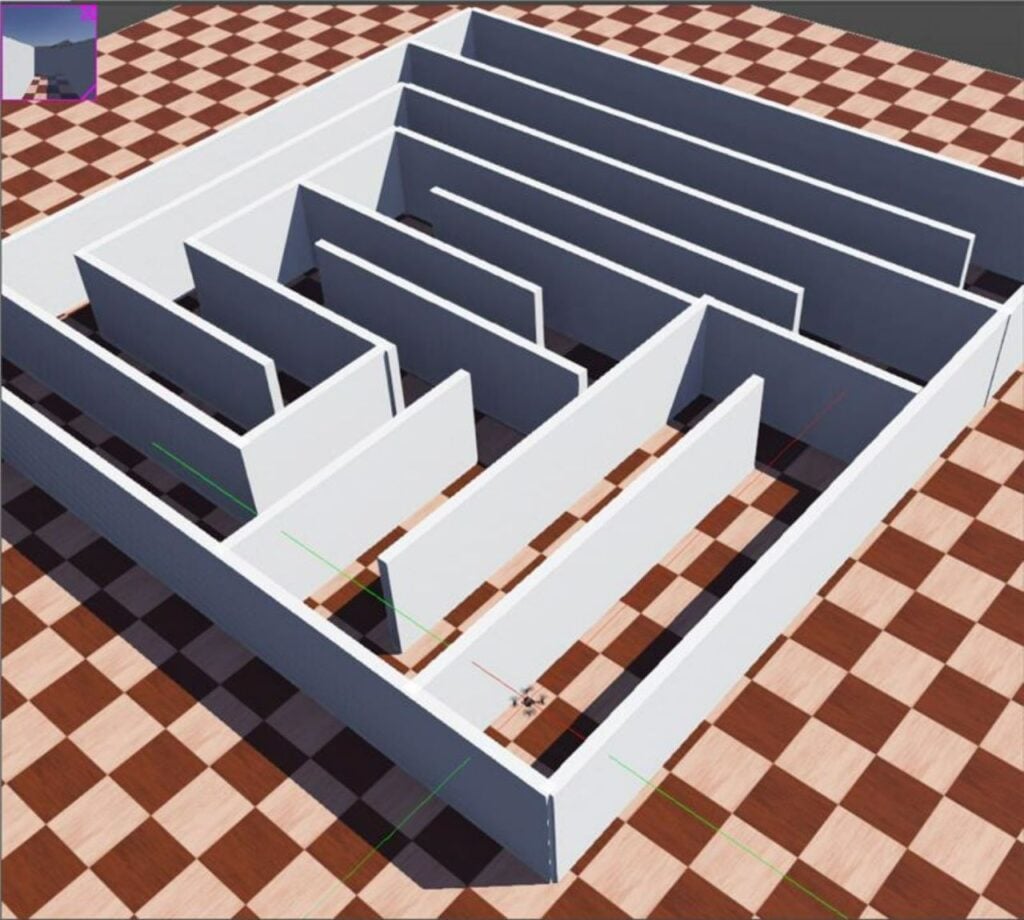
Autonomous drone navigating a complex maze using LIDAR and IMU sensors, simulating search and rescue operations in hazardous environments.