Bio-Locomotion
Pteropod Swimming Behavior as a Bio Assay for Ocean Acidification
Ocean acidification (OA) poses a serious threat, particularly to organisms that precipitate calcium carbonate from seawater. One organism with an aragonite shell that is a key to high latitude ecosystems is the pteropod. With OA, the pteropod shell will thin because the aragonite is highly soluble. As the shell thins, it changes the mass distribution and buoyancy of the animal, which will affect locomotion and through it, all locomotion dependent behavior such as foraging, mating, predator avoidance and migratory patterns. A lower shell weight will be counterbalanced by a smaller mucus web potentially decreasing ingestion rates and carbon flux rates. This interdisciplinary research relies on biological studies of swimming behavior of the pteropod mollusk Limacina helicina in their natural environments with fluid mechanics analyses of swimming hydrodynamics via 3D tomographic particle-image velocimetry and computational fluid dynamics (CFD). This work will: (a) determine how the L. helicina uses its ‘wings’ (parapodia) to propel itself; (b) examine whether its locomotory kinematics provide efficient propulsion; (c) identify the factors that influence swimming trajectory and ‘wobble’; and (d) synthesize all data and insights into guidelines for the potential use of pteropod swimming behavior as a bioassay for OA.
Collaborators: Jeannette Yen and Donald Webster (Georgia Tech)
 |
 |
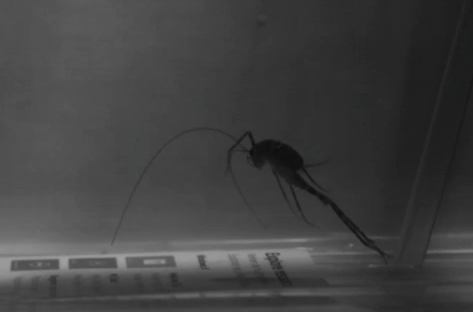
Aeromechanics of Spider Crickets: Flight Stabilization and Posture Control
Students
Advisors: Rajat Mittal and Noah Cowan
The project is aimed at understanding how animals without wings that can jump over long distances, like crickets, grasshoppers and jumping spiders, stabilize and control their posture during their “flight”. We are studying not only aerodynamic forces, but also how insects manipulate their inertial properties through body deformation. We are also studying the mechanics and kinematics of takeoff and their correlation with jumping distance. Finally, the role of visual sensory cues on posture control is also being studied. The research employs high-speed videography as well as computational modeling of the aerodynamics and aero-structural interaction. From the experimental and computational analysis, simple dynamic and sensorimotor control models are being developed and used to explore hypotheses regarding stabilization and posture control.