Current Projects
1. Artificial intelligence Optical Coherence Tomography Guided Deep Anterior Lamellar Keratoplasty (AUTO-DALK)
We are working with expertise of photonics, surgical tools, medical robotics engineering groups, and clinical corneal researchers to develop a novel, automated, clinical-grade optical coherence tomography distal sensor and image-guided DALK trephine/pneumodissection system that simplifies the overall DALK procedure while improving the accuracy that results in better outcomes. 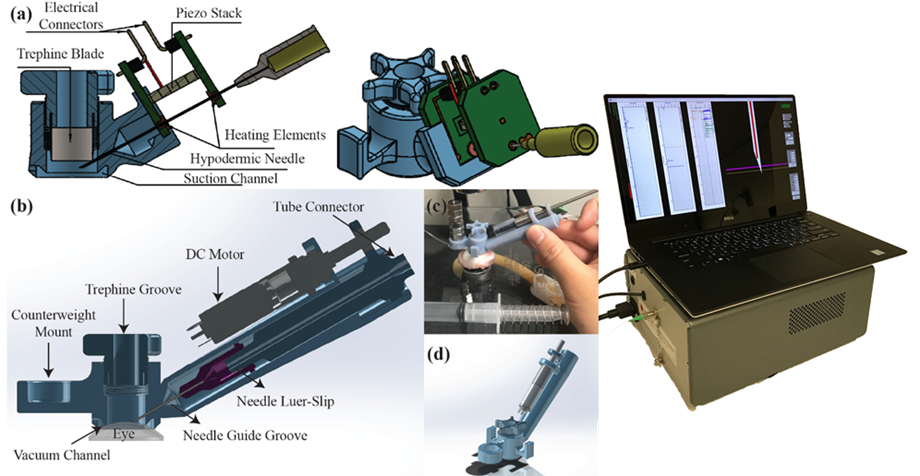
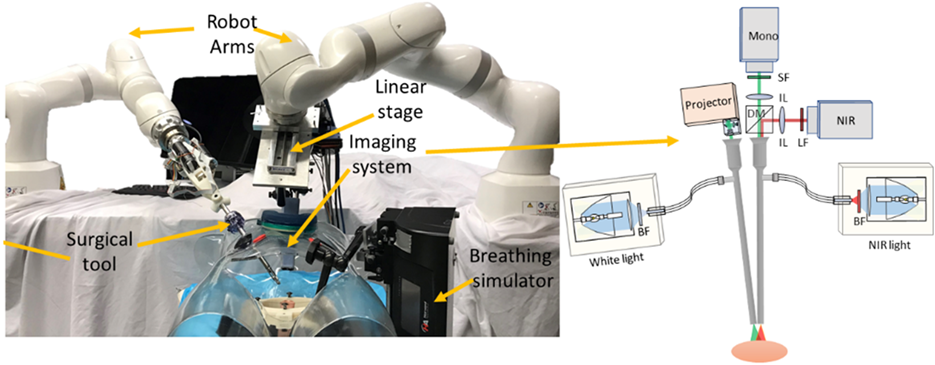
2. Endoscopic Fringe Projection Profilometry for Robot Assisted Intestine Anastomosis
We develop an endoscopic fringe projection profilometry for robot assisted intestine anastomosis. We use a KUKA LBR MED robot for a precise and stable surgical tool control. Read more.
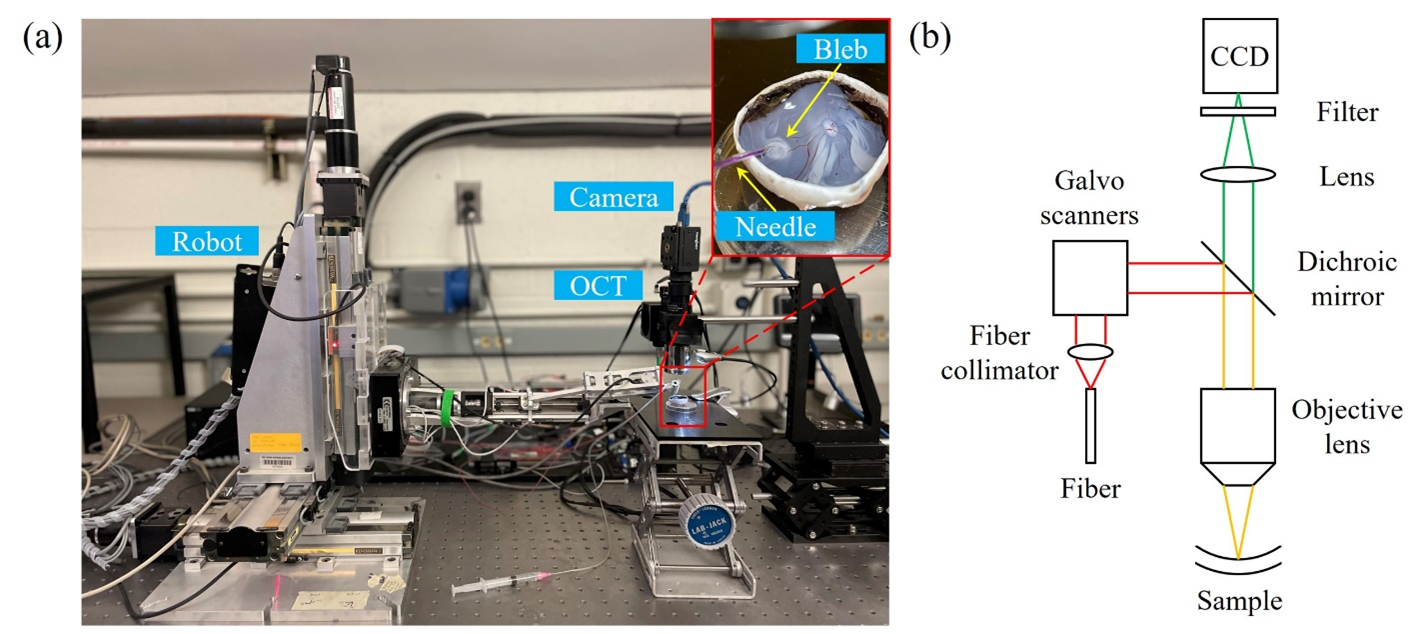
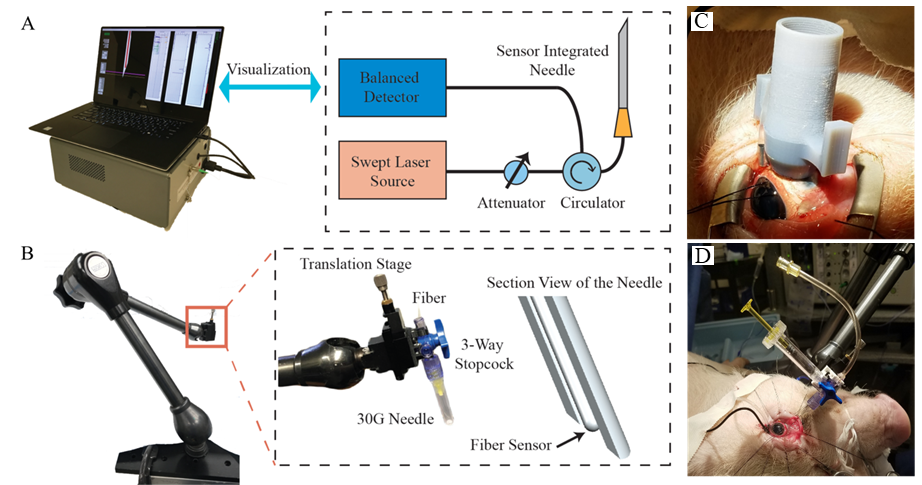
3. Optical Coherence Tomography Distal-Sensor Guided Manual Injection Device for Transscleral Subretinal Injection
We designed the common-path swept source optical coherence tomography (CP-SSOCT) fiber probe sensor guided injection device, which can provide the layer information of the retina with micron accuracy to delivery of novel therapeutics into the subretinal space.
4. Microscope Integrated Optical Coherence Tomography for Robot Assisted Subretinal Injection
We develop a microscope integrated optical coherence tomography for robot assisted subretinal injection. We use a steady-hand eye robot for a precise and stable needle control.