Hippocampal SLAM and Navigation
Team member(s)
- Zhaoqi Chen
- Alia Nasrallah
- Adam Cellon
Publications
Project Discriptopn & Figures:
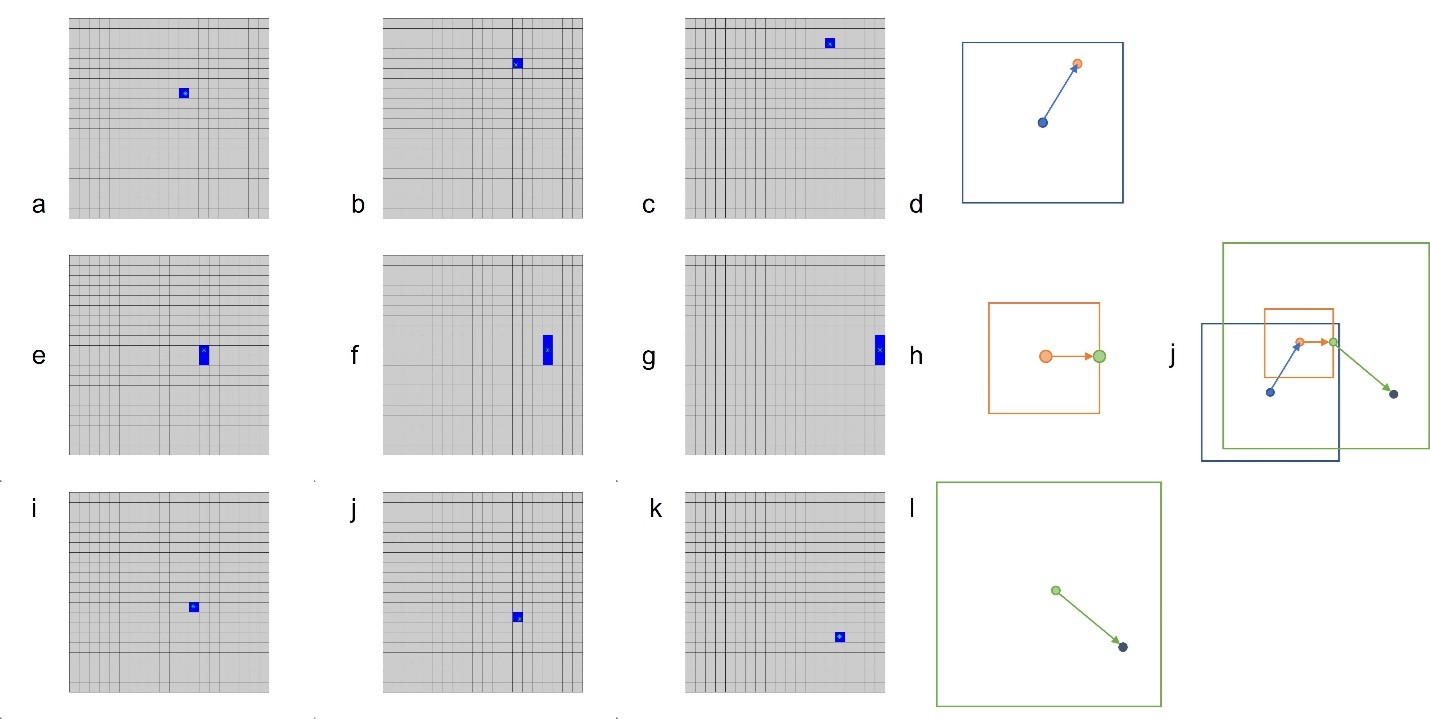
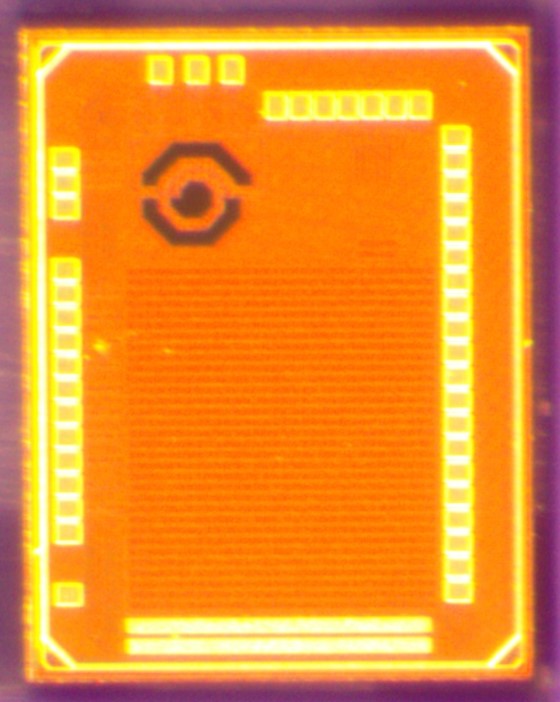
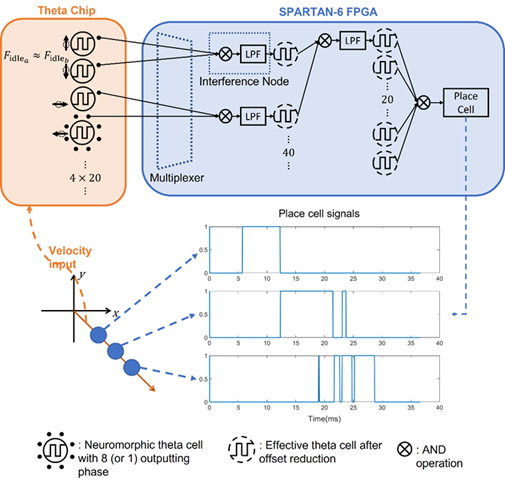
Aimed at building a biologically plausible system to reproduce the spatial encoding behavior discovered in the Hippocampus of rodents. This topic helps improve the understanding of neurological system as well as the robotic SLAM problem. Specifically, several groups of neurons will become active in various ways only when the rodent is at certain spatial locations. Neurological models attribute such spatial encoding to be originated from neurons that react to the animal’s locomotion. We believe that the capability of navigation and tracking is achieved through the interaction between these groups of neurons, and the project is structured to test and improve hypothetical models of such interactions to achieve a navigation and tracking system inspired from the neural activities. A mixed-mode ASIC chip is designed to generate the basic neural response to locomotion. An improved model for generating spatial encoding in the environment of silicon circuits has been proposed. Currently, we are implementing the model with the chip and FPGA for an integrated system for path tracking and mapping.